UART
นาย ธีรพัจน์ วัฒนากร ชทค.1/1 เลขที่06 64301280006
UART โปรโตคอลการสื่อสารด้วยฮาร์ดแวร์
การทำความเข้าใจเครื่องรับ/ส่งสัญญาณแบบอะซิงโครนัสสากล
บทคัดย่อ
UART หรือตัวรับส่งสัญญาณแบบอะซิงโครนัสสากลเป็นหนึ่งในโปรโตคอลการสื่อสารระหว่างอุปกรณ์กับอุปกรณ์ที่ใช้มากที่สุด บทความนี้แสดงวิธีการใช้ UART เป็นโปรโตคอลการสื่อสารฮาร์ดแวร์โดยปฏิบัติตามขั้นตอนมาตรฐาน เมื่อกำหนดค่าอย่างถูกต้อง UART สามารถทำงานกับโปรโตคอลซีเรียลหลายประเภทที่เกี่ยวข้องกับการส่งและรับข้อมูลซีเรียล ในการสื่อสารแบบอนุกรม ข้อมูลจะถูกถ่ายโอนทีละบิตโดยใช้สายหรือสายเส้นเดียว ในการสื่อสารแบบสองทาง เราใช้สองสายสำหรับการถ่ายโอนข้อมูลแบบอนุกรมที่ประสบความสำเร็จ ขึ้นอยู่กับความต้องการของแอพพลิเคชั่นและระบบ การสื่อสารแบบอนุกรมต้องการวงจรและสายไฟน้อยลง ซึ่งช่วยลดต้นทุนในการใช้งาน
โดยเน้นที่การส่งแพ็กเก็ต โปรโตคอลเฟรมมาตรฐาน และกำหนดเอง
โปรโตคอลเฟรมที่เป็นคุณสมบัติเสริมสำหรับการปฏิบัติตามความปลอดภัยเมื่อ
ดำเนินการโดยเฉพาะในระหว่างการพัฒนาโค้ด ในระหว่างการพัฒนาผลิตภัณฑ์
เอกสารนี้มีจุดมุ่งหมายเพื่อแบ่งปันขั้นตอนพื้นฐาน
ในตอนท้ายของบทความ เป้าหมายคือเพื่อความเข้าใจที่ดีขึ้นและการปฏิบัติตาม
มาตรฐาน UART เพื่อเพิ่มขีดความสามารถและการใช้งานสูงสุด โดยเฉพาะอย่างยิ่งเมื่อการพัฒนาผลิตภัณฑ์ใหม่
“ปัญหาเดียวที่ใหญ่ที่สุดในการสื่อสาร คือภาพลวงตาที่มันเกิดขึ้น”
-จอร์จ เบอร์นาร์ด ชอว์
โปรโตคอลการสื่อสารมีบทบาทสำคัญในการจัดการสื่อสารระหว่าง อุปกรณ์ ได้รับการออกแบบในรูปแบบต่างๆ ตามความต้องการของระบบ และ โปรโตคอลเหล่านี้มีกฎเฉพาะ ระหว่างอุปกรณ์เพื่อให้การสื่อสารที่ประสบความสำเร็จ
ระบบสมองกลฝังตัว ไมโครคอนโทรลเลอร์ และคอมพิวเตอร์ส่วนใหญ่ใช้ UART เป็น รูปแบบของโปรโตคอลการสื่อสารระหว่างอุปกรณ์กับอุปกรณ์ ท่ามกลางความพร้อมใช้งาน โปรโตคอลการสื่อสารที่มีความสามารถ UART ใช้เพียงสองสายในการส่งสัญญาณและ รับสัญญาณ
แม้จะเป็นวิธีที่ใช้กันอย่างแพร่หลายในโปรโตคอลการสื่อสารฮาร์ดแวร์ แต่ก็ไม่ได้รับการปรับ
ให้เหมาะสมใช้งานได้อย่างเต็มที่ตลอดเวลา ไม่ได้รับการปรับให้เหมาะสมอย่างเต็มที่ตลอดเวลา
การใช้โปรโตคอลเฟรมอย่างเหมาะสมมักถูกละเลยเมื่อใช้โมดูล UART ภายในไมโครคอนโทรลเลอร์
คำจำกัดความของ UART คือโปรโตคอลการสื่อสารฮาร์ดแวร์ที่ใช้อะซิงโครนัส การสื่อสารแบบอนุกรม nous ด้วยความเร็วที่กำหนดได้ อะซิงโครนัสหมายถึงที่นั่น ไม่มีสัญญาณนาฬิกาเพื่อซิงโครไนซ์บิตเอาต์พุตจากอุปกรณ์ส่งสัญญาณ ไปถึงจุดสิ้นสุดการรับ
คำจำกัดความของ UART คือโปรโตคอลการสื่อสารฮาร์ดแวร์ที่ใช้อะซิงโครนัส การสื่อสารแบบอนุกรม nous ด้วยความเร็วที่กำหนดได้ อะซิงโครนัสหมายถึงที่นั่น ไม่มีสัญญาณนาฬิกาเพื่อซิงโครไนซ์บิตเอาต์พุตจากอุปกรณ์ส่งสัญญาณ ไปถึงจุดสิ้นสุดการรับ
 | ||
| รูปที่ 1. UART สองตัวสื่อสารกันโดยตรง สัญญาณสองสัญญาณของอุปกรณ์ UART แต่ละเครื่องมีชื่อ เครื่องส่ง (Tx) ตัวรับ (Rx) วัตถุประสงค์หลักของสายเครื่องส่งและตัวรับสำหรับอุปกรณ์แต่ละตัวคือเพื่อส่งและรับข้อมูลอนุกรมสำหรับการสื่อสารแบบอนุกรม
UART ที่ส่งสัญญาณเชื่อมต่อกับบัสข้อมูลควบคุมที่ส่งข้อมูลในรูปแบบคู่ขนาน จากนี้ ข้อมูลจะถูกส่งไปยังสายส่ง (สาย) แบบอนุกรมทีละบิตไปยัง UART ที่รับ ในทางกลับกันจะแปลงข้อมูลซีเรียลเป็นแบบขนานสำหรับอุปกรณ์ที่รับสาย UART ทำหน้าที่เป็นสื่อในการสื่อสารในการส่งและรับข้อมูลหนึ่งไปยังอีกข้อมูลหนึ่ง โปรดทราบว่าอุปกรณ์ UART มีพินส่งและรับเฉพาะสำหรับการส่งหรือรับ สำหรับ UART และการสื่อสารแบบอนุกรมส่วนใหญ่ อัตราบอดจะต้องตั้งค่าเหมือนกันทั้งบนอุปกรณ์ส่งและรับ อัตราบอดคืออัตราที่ข้อมูลถูกถ่ายโอนไปยังช่องทางการสื่อสาร ในบริบทของพอร์ตอนุกรมอัตราบอดที่ตั้งไว้จะทำหน้าที่เป็นจำนวนบิตสูงสุดต่อวินาทีที่จะถ่ายโอน |

ตารางที่ 1 สรุปสิ่งที่เราต้องรู้เกี่ยวกับ UART

อินเทอร์เฟซ UART ไม่ใช้สัญญาณนาฬิกาเพื่อซิงโครไนซ์อุปกรณ์เครื่องส่งและตัวรับสัญญาณ
มันส่งข้อมูลแบบอะซิงโครนัส แทนที่จะเป็นสัญญาณนาฬิกา ตัวส่งจะสร้างบิตสตรีม
ตามสัญญาณนาฬิกาในขณะที่เครื่องรับใช้สัญญาณนาฬิกาภายในเพื่อสุ่มตัวอย่าง
ข้อมูลที่เข้ามา จุดของการซิงโครไนซ์ได้รับการจัดการโดยมีอัตราบอดเท่ากัน
ในอุปกรณ์ทั้งสอง การไม่ทำเช่นนั้นอาจส่งผลต่อระยะเวลาในการส่งและรับข้อมูล
ที่อาจทำให้เกิดความคลาดเคลื่อนระหว่างการจัดการข้อมูล ความแตกต่างที่
อนุญาตของอัตราบอดสูงถึง 10% ก่อนที่จังหวะเวลาของบิตจะห่างเหินเกินไป
การส่งข้อมูล
ใน UART โหมดการส่งจะอยู่ในรูปของแพ็กเก็ต
ชิ้นส่วนที่เชื่อมต่อเครื่องส่งและเครื่องรับรวมถึงการสร้างแพ็คเก็ตอนุกรมและ
ควบคุมสายฮาร์ดแวร์ทางกายภาพเหล่านั้น แพ็กเก็ตประกอบด้วยบิตเริ่มต้น
ดาต้าเฟรม พาริตีบิต และบิตหยุด
ชิ้นส่วนที่เชื่อมต่อเครื่องส่งและเครื่องรับรวมถึงการสร้างแพ็คเก็ตอนุกรมและ
ควบคุมสายฮาร์ดแวร์ทางกายภาพเหล่านั้น แพ็กเก็ตประกอบด้วยบิตเริ่มต้น
ดาต้าเฟรม พาริตีบิต และบิตหยุด
 |
| รูปที่ 3 แพ็กเก็ต UART Start Bit โดยปกติสายส่งข้อมูล UART จะอยู่ที่ระดับไฟฟ้าแรงสูงเมื่อไม่ได้ส่งข้อมูล ในการเริ่มต้นการถ่ายโอนข้อมูล UART ที่ส่งสัญญาณจะดึงสายส่งจากสูงไปต่ำเป็นเวลาหนึ่ง (1) รอบนาฬิกา เมื่อ UART ที่ได้รับตรวจพบการเปลี่ยนแปลงของแรงดันไฟฟ้าสูงไปต่ำ มันจะเริ่มอ่านบิตในกรอบข้อมูลที่ความถี่ ของอัตราบอร์ด |
| รูปที่ 4 บิตเริ่มต้น |
Data Frame
Data Frameประกอบด้วยข้อมูลจริงที่กำลังถ่ายโอน อาจมีความยาวได้ห้า (5) บิตสูงสุดแปด (8) บิตหากใช้พาริตีบิต หากไม่มีการใช้พาริตีบิต กรอบข้อมูลอาจมีความยาวได้เก้า (9) บิต ในกรณีส่วนใหญ่ข้อมูลจะถูกส่งด้วยบิตที่มีนัยสำคัญน้อยที่สุดก่อน
 |
| รูปที่ 5. กรอบข้อมูล |
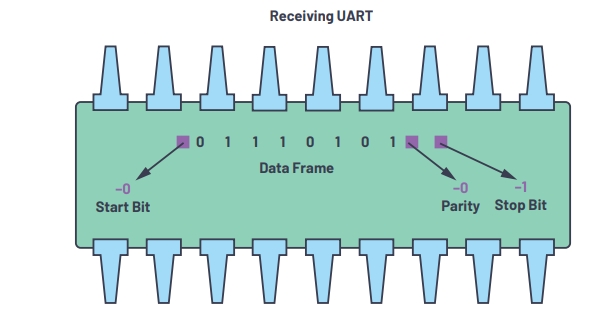
อธิบายความเท่าเทียมกันหรือความคี่ของตัวเลข พาริตีบิตเป็นวิธีหนึ่งในการรับ UART
เพื่อบอกว่าข้อมูลใด ๆ มีการเปลี่ยนแปลงในระหว่างการส่งหรือไม่ บิตสามารถเปลี่ยนแปลงได้โดย
การแผ่รังสีแม่เหล็กไฟฟ้า อัตราบอดที่ไม่ตรงกัน หรือการถ่ายโอนข้อมูลทางไกลหลังจากที่ UART ที่ได้รับการอ่าน data frame จะนับจำนวนบิตที่มีค่า 1 และตรวจสอบว่าผลรวมเป็นเลขคู่หรือเลขคี่ ถ้าพาริตีบิตเป็น 0 (พาริตีคู่) บิตที่ 1 หรือตรรกะสูงในกรอบข้อมูลควรรวมเป็นเลขคู่ หากพาริตีบิตเป็น 1 (พาริตีคี่) ค่า 1 บิตหรือลอจิกไฮส์ในกรอบข้อมูลควรรวมเป็นเลขคี่ เมื่อบิตพาริตีตรงกับข้อมูล UART จะรู้ว่าการส่งข้อมูลไม่มีข้อผิดพลาด แต่ถ้าพาริตีบิตเป็น 0 และผลรวมเป็นคี่ หรือพาริตีบิตเป็น 1 และผลรวมเป็นเลขคู่ UART จะรู้ว่าบิตในกรอบข้อมูลมีการเปลี่ยนแปลง
การแผ่รังสีแม่เหล็กไฟฟ้า อัตราบอดที่ไม่ตรงกัน หรือการถ่ายโอนข้อมูลทางไกลหลังจากที่ UART ที่ได้รับการอ่าน data frame จะนับจำนวนบิตที่มีค่า 1 และตรวจสอบว่าผลรวมเป็นเลขคู่หรือเลขคี่ ถ้าพาริตีบิตเป็น 0 (พาริตีคู่) บิตที่ 1 หรือตรรกะสูงในกรอบข้อมูลควรรวมเป็นเลขคู่ หากพาริตีบิตเป็น 1 (พาริตีคี่) ค่า 1 บิตหรือลอจิกไฮส์ในกรอบข้อมูลควรรวมเป็นเลขคี่ เมื่อบิตพาริตีตรงกับข้อมูล UART จะรู้ว่าการส่งข้อมูลไม่มีข้อผิดพลาด แต่ถ้าพาริตีบิตเป็น 0 และผลรวมเป็นคี่ หรือพาริตีบิตเป็น 1 และผลรวมเป็นเลขคู่ UART จะรู้ว่าบิตในกรอบข้อมูลมีการเปลี่ยนแปลง
 |
| รูปที่ 6 Parity bits Stop Bits ในการส่งสัญญาณการสิ้นสุดของแพ็กเก็ตข้อมูล UART ที่ส่งจะขับเคลื่อนสายส่งข้อมูลจากแรงดันไฟฟ้าต่ำไปเป็นไฟฟ้าแรงสูงในระยะเวลาหนึ่ง (1) ถึงสอง (2) บิต |
 |
| รูปที่ 7 Stop bits |
ขั้นตอนของการส่งสัญญาณ UART
ขั้นตอนแรก: UART ที่ส่งสัญญาณได้รับข้อมูลแบบขนานจากบัสข้อมูล
ขั้นตอนที่สอง: UART ที่ส่งสัญญาณจะเพิ่มบิตเริ่มต้น บิตพาริตี และบิตหยุดลงในเฟรมข้อมูล
ขั้นตอนที่สาม: แพ็กเก็ตทั้งหมดจะถูกส่งตามลำดับโดยเริ่มจากบิตเริ่มต้นไปยังบิตหยุดจาก UART ที่ส่งไปยัง UART ที่รับ UART ที่รับจะสุ่มตัวอย่างสายข้อมูลที่อัตราบอดที่กำหนดค่าไว้ล่วงหน้า
Frame Protocol
คุณลักษณะสำคัญประการหนึ่งที่มีอยู่ใน UART แต่ยังไม่ได้ใช้อย่างเต็มที่คือการใช้งานโปรโตคอลเฟรม การใช้งานหลักและความสำคัญของสิ่งนี้เป็นการเพิ่มคุณค่าสำหรับการรักษาความปลอดภัยและการป้องกันในแต่ละอุปกรณ์ตัวอย่างเช่น เมื่ออุปกรณ์สองเครื่องใช้โปรโตคอลเฟรม UART เดียวกัน มีแนวโน้มว่าเมื่อเชื่อมต่อกับ UART เดียวกันโดยไม่ตรวจสอบการกำหนดค่า อุปกรณ์จะเชื่อมต่อกับพินที่แตกต่างกันซึ่งอาจทำให้ระบบทำงานผิดปกติในทางกลับกัน การนำสิ่งนี้ไปใช้เพื่อรับรองความปลอดภัย เนื่องจากจำเป็นต้องแยกวิเคราะห์ข้อมูลที่ได้รับซึ่งสอดคล้องกับโปรโตคอลเฟรมการออกแบบ โปรโตคอลเฟรมแต่ละตัวได้รับการออกแบบมาโดยเฉพาะเพื่อให้มีเอกลักษณ์และปลอดภัยในการออกแบบโปรโตคอลเฟรม นักออกแบบสามารถตั้งค่าส่วนหัวและส่วนท้ายที่ต้องการ รวมถึง CRC ให้กับอุปกรณ์ต่างๆ ในรูปที่ 13 สอง (2) ไบต์ถูกตั้งค่าเป็นส่วนหนึ่งของส่วนหัว
UART Operations
เมื่อใช้โปรโตคอลการสื่อสารฮาร์ดแวร์ใดๆ จำเป็นต้องตรวจสอบเอกสารข้อมูลและคู่มืออ้างอิงฮาร์ดแวร์ก่อน
 |
| รูปที่ 8 บัสข้อมูลไปยัง UART ที่ส่งสัญญาณ |
ขั้นตอนที่สอง: UART ที่ส่งสัญญาณจะเพิ่มบิตเริ่มต้น บิตพาริตี และบิตหยุดลงในเฟรมข้อมูล
 |
| รูปที่ 9 กรอบข้อมูล UART ที่ด้าน Tx |
ขั้นตอนที่สาม: แพ็กเก็ตทั้งหมดจะถูกส่งตามลำดับโดยเริ่มจากบิตเริ่มต้นไปยังบิตหยุดจาก UART ที่ส่งไปยัง UART ที่รับ UART ที่รับจะสุ่มตัวอย่างสายข้อมูลที่อัตราบอดที่กำหนดค่าไว้ล่วงหน้า
 |
| รูปที่ 10. การส่ง UART ขั้นตอนที่สี่: UART ที่ได้รับจะละทิ้งบิตเริ่มต้น บิตพาริตี และบิตหยุดจากกรอบข้อมูล |
 |
| รูปที่ 11 กรอบข้อมูล UART ที่ด้าน Rx ขั้นตอนที่ห้า: UART ที่ได้รับจะแปลงข้อมูลอนุกรมกลับเป็นแบบขนานและโอนไปยังบัสข้อมูลในส่วนรับ |
 |
| รูปที่ 12. การรับ UART ไปยังบัสข้อมูล |
Frame Protocol
คุณลักษณะสำคัญประการหนึ่งที่มีอยู่ใน UART แต่ยังไม่ได้ใช้อย่างเต็มที่คือการใช้งานโปรโตคอลเฟรม การใช้งานหลักและความสำคัญของสิ่งนี้เป็นการเพิ่มคุณค่าสำหรับการรักษาความปลอดภัยและการป้องกันในแต่ละอุปกรณ์ตัวอย่างเช่น เมื่ออุปกรณ์สองเครื่องใช้โปรโตคอลเฟรม UART เดียวกัน มีแนวโน้มว่าเมื่อเชื่อมต่อกับ UART เดียวกันโดยไม่ตรวจสอบการกำหนดค่า อุปกรณ์จะเชื่อมต่อกับพินที่แตกต่างกันซึ่งอาจทำให้ระบบทำงานผิดปกติในทางกลับกัน การนำสิ่งนี้ไปใช้เพื่อรับรองความปลอดภัย เนื่องจากจำเป็นต้องแยกวิเคราะห์ข้อมูลที่ได้รับซึ่งสอดคล้องกับโปรโตคอลเฟรมการออกแบบ โปรโตคอลเฟรมแต่ละตัวได้รับการออกแบบมาโดยเฉพาะเพื่อให้มีเอกลักษณ์และปลอดภัยในการออกแบบโปรโตคอลเฟรม นักออกแบบสามารถตั้งค่าส่วนหัวและส่วนท้ายที่ต้องการ รวมถึง CRC ให้กับอุปกรณ์ต่างๆ ในรูปที่ 13 สอง (2) ไบต์ถูกตั้งค่าเป็นส่วนหนึ่งของส่วนหัว
 |
| รูปที่ 13 ตัวอย่างโปรโตคอลเฟรม UART จากตัวอย่าง คุณสามารถตั้งค่าส่วนหัว ตัวอย่าง และ CRC เฉพาะสำหรับอุปกรณ์ของคุณ Header 1 (H1 is 0xAB) and Header 2 (H2 is 0xCD) ส่วนหัวเป็นตัวระบุเฉพาะที่กำหนดว่าคุณกำลังสื่อสารกับอุปกรณ์ที่ถูกต้อง Command (CMD) Selection คำสั่งจะขึ้นอยู่กับรายการคำสั่งที่ออกแบบมาเพื่อสร้างการสื่อสารระหว่างอุปกรณ์สองเครื่อง Data Length (DL) per Command ความยาวของข้อมูลจะขึ้นอยู่กับคำสั่งที่เลือก คุณสามารถเพิ่มความยาวของข้อมูลให้สูงสุดได้ขึ้นอยู่กับคำสั่งที่เลือก ดังนั้นจึงอาจแตกต่างกันไปตามการเลือก ในกรณีดังกล่าว สามารถปรับความยาวของข้อมูลได้ Data n (Varying Data) ข้อมูลคือเพย์โหลดที่จะถ่ายโอนจากอุปกรณ์ Trailer 1 (T1 is 0xE1) and Trailer 2 (T2 is 0xE2) รถพ่วงเป็นข้อมูลที่เพิ่มเข้ามาหลังจากสิ้นสุดการส่ง เช่นเดียวกับส่วนหัว พวกเขาสามารถระบุได้โดยไม่ซ้ำกัน Cyclic Redundancy Checking (CRC Formula) สูตรการตรวจสอบความซ้ำซ้อนในการวนรอบเป็นโหมดการตรวจจับข้อผิดพลาดเพิ่มเติมเพื่อตรวจจับการเปลี่ยนแปลงข้อมูลดิบโดยไม่ได้ตั้งใจ ค่า CRC ของอุปกรณ์ส่งสัญญาณจะต้องเท่ากับการคำนวณ CRC ที่ปลายเครื่องรับเสมอขอแนะนำให้เพิ่มการรักษาความปลอดภัยโดยใช้โปรโตคอลเฟรมสำหรับอุปกรณ์ UART แต่ละเครื่อง โปรโตคอลเฟรมต้องการการกำหนดค่าที่เหมือนกันทั้งบนอุปกรณ์ส่งและรับ |
เมื่อใช้โปรโตคอลการสื่อสารฮาร์ดแวร์ใดๆ จำเป็นต้องตรวจสอบเอกสารข้อมูลและคู่มืออ้างอิงฮาร์ดแวร์ก่อน
นี่คือขั้นตอนที่ต้องปฏิบัติตาม:
ขั้นตอนแรก: ตรวจสอบอินเทอร์เฟซแผ่นข้อมูลของอุปกรณ์
 |
| รูปที่ 14. แผ่นข้อมูลไมโครคอนโทรลเลอร์ |
 |
| รูปที่ 15. แผนที่หน่วยความจำไมโครคอนโทรลเลอร์ |
ขั้นตอนที่สาม: ตรวจสอบรายละเอียดเฉพาะสำหรับ UART PORT เช่น
โหมดการทำงาน ความยาวของบิตข้อมูล พาริตีบิต และบิตหยุด รายละเอียดพอร์ต UART
ตัวอย่างในแผ่นข้อมูล: UART Port MCU ตัวอย่างมีพอร์ต UART แบบฟูลดูเพล็กซ์ ซึ่งเข้ากันได้กับ UARTมาตรฐานของพีซีอย่างสมบูรณ์ พอร์ต UART ให้อินเทอร์เฟซ UART แบบง่ายแก่อุปกรณ์ต่อพ่วง
หรือโฮสต์อื่น ๆ ซึ่งสนับสนุนฟูลดูเพล็กซ์, DMA และการถ่ายโอนข้อมูลอนุกรมแบบอะซิงโครนัส
พอร์ต UART รองรับบิตข้อมูลห้าถึงแปดบิต และไม่มีแพริตีคู่หรือคี่ เฟรมสิ้นสุดด้วยบิตหยุดหนึ่งและครึ่ง
หรือสองบิต
ขั้นตอนที่สี่: ตรวจสอบรายละเอียดการทำงานของ UART รวมถึงการคำนวณอัตราบอด
อัตราบอดถูกกำหนดค่าโดยใช้สูตรตัวอย่างต่อไปนี้ สูตรนี้จะแตกต่างกันไปขึ้นอยู่กับไมโครคอนโทรลเลอร์
รายละเอียดตัวอย่างการดำเนินการ UART:
5 to 8 data bits
1, 2, or 1 and ½ stop bits
None, or even or odd parity
Programmable oversample rate by 4, 8, 16, 32
Baud rate = PCLK/((M + N/2048) × 2OSR + 2 × DIV
OSR (oversample rate)
UART_LCR2.OSR = 0 to 3
DIV (baud rate divider)
UART_DIV = 1 to 65535
M (DIVM fractional baud rate M)
UART_FBR.DIVM = 1 to 3
N (DIVM fractional baud rate M)
UART_FBR.DIVN = 0 to 2047
5 to 8 data bits
1, 2, or 1 and ½ stop bits
None, or even or odd parity
Programmable oversample rate by 4, 8, 16, 32
Baud rate = PCLK/((M + N/2048) × 2OSR + 2 × DIV
OSR (oversample rate)
UART_LCR2.OSR = 0 to 3
DIV (baud rate divider)
UART_DIV = 1 to 65535
M (DIVM fractional baud rate M)
UART_FBR.DIVM = 1 to 3
N (DIVM fractional baud rate M)
UART_FBR.DIVN = 0 to 2047
ขั้นตอนที่ห้า: สำหรับอัตราบอด ตรวจสอบให้แน่ใจว่าได้ตรวจสอบนาฬิกาต่อพ่วง (PCLK) ใดที่จะใช้ ใน ตัวอย่างนี้ มี PCLK 26 MHz และ PCLK 16 MHz ที่พร้อมใช้งาน โปรดสังเกตว่า OSR, DIV, DIVM และ DIVN แตกต่างกันไปตามอุปกรณ์

ขั้นตอนหก: ส่วนถัดไปคือการตรวจสอบรายละเอียดการลงทะเบียนสำหรับการกำหนดค่า UART ดูพารามิเตอร์ในการคำนวณอัตราบอดเช่น UART_LCR2, UART_DIV และ UART_FBR ตารางที่ 4 จะนำไปสู่การลงทะเบียนเฉพาะที่ครอบคลุม

ทำไมมันถึงสำคัญ?
ความคุ้นเคยกับโปรโตคอลการสื่อสาร UART นั้นเป็นประโยชน์เมื่อพัฒนาผลิตภัณฑ์ที่มี
ประสิทธิภาพและขับเคลื่อนด้วยคุณภาพ การรู้วิธีส่งข้อมูลโดยใช้เพียงสองสาย เช่นเดียวกับ
วิธีขนส่งข้อมูลทั้งชุดหรือเพย์โหลด จะช่วยให้มั่นใจได้ว่าข้อมูลจะได้รับการถ่ายโอนและรับ
โดยไม่มีข้อผิดพลาด เนื่องจาก UART เป็นโปรโตคอลการสื่อสารฮาร์ดแวร์ที่ใช้กันมากที่สุด
ความรู้นี้สามารถช่วยให้การออกแบบมีความยืดหยุ่นในการออกแบบในอนาคต
ประสิทธิภาพและขับเคลื่อนด้วยคุณภาพ การรู้วิธีส่งข้อมูลโดยใช้เพียงสองสาย เช่นเดียวกับ
วิธีขนส่งข้อมูลทั้งชุดหรือเพย์โหลด จะช่วยให้มั่นใจได้ว่าข้อมูลจะได้รับการถ่ายโอนและรับ
โดยไม่มีข้อผิดพลาด เนื่องจาก UART เป็นโปรโตคอลการสื่อสารฮาร์ดแวร์ที่ใช้กันมากที่สุด
ความรู้นี้สามารถช่วยให้การออกแบบมีความยืดหยุ่นในการออกแบบในอนาคต
ใช้กรณี
คุณสามารถใช้ UART กับแอปพลิเคชันมากมาย เช่น:
การดีบัก: การตรวจหาจุดบกพร่องของระบบตั้งแต่เนิ่นๆ เป็นสิ่งสำคัญในระหว่างการพัฒนา
การเพิ่ม UART สามารถช่วยในสถานการณ์นี้ได้โดยการจับข้อความจากระบบ การติดตามระดับฟังก์ชันการผลิต: บันทึกมีความสำคัญมากในการผลิต
โดยจะกำหนดฟังก์ชันการทำงานโดยแจ้งเตือนผู้ปฏิบัติงานถึงสิ่งที่เกิดขึ้นในสายการผลิต
การอัปเดตลูกค้าหรือไคลเอ็นต์: การอัปเดตซอฟต์แวร์มีความสำคัญอย่างยิ่ง
การมีฮาร์ดแวร์แบบไดนามิกที่สมบูรณ์พร้อมซอฟต์แวร์ที่สามารถอัปเดตได้นั้นมีความสำคัญต่อการมีระบบที่สมบูรณ์ การทดสอบ/การตรวจสอบ: การตรวจสอบผลิตภัณฑ์ก่อนออกจากกระบวนการผลิตจะ
ช่วยส่งมอบผลิตภัณฑ์ที่มีคุณภาพดีที่สุดให้กับลูกค้า
การดีบัก: การตรวจหาจุดบกพร่องของระบบตั้งแต่เนิ่นๆ เป็นสิ่งสำคัญในระหว่างการพัฒนา
การเพิ่ม UART สามารถช่วยในสถานการณ์นี้ได้โดยการจับข้อความจากระบบ การติดตามระดับฟังก์ชันการผลิต: บันทึกมีความสำคัญมากในการผลิต
โดยจะกำหนดฟังก์ชันการทำงานโดยแจ้งเตือนผู้ปฏิบัติงานถึงสิ่งที่เกิดขึ้นในสายการผลิต
การอัปเดตลูกค้าหรือไคลเอ็นต์: การอัปเดตซอฟต์แวร์มีความสำคัญอย่างยิ่ง
การมีฮาร์ดแวร์แบบไดนามิกที่สมบูรณ์พร้อมซอฟต์แวร์ที่สามารถอัปเดตได้นั้นมีความสำคัญต่อการมีระบบที่สมบูรณ์ การทดสอบ/การตรวจสอบ: การตรวจสอบผลิตภัณฑ์ก่อนออกจากกระบวนการผลิตจะ
ช่วยส่งมอบผลิตภัณฑ์ที่มีคุณภาพดีที่สุดให้กับลูกค้า

เกี่ยวกับผู้เขียน
Eric Peňa เป็นวิศวกรเฟิร์มแวร์อาวุโสและเป็นส่วนหนึ่งของทีมออกแบบและเลย์เอาต์ที่ทำงานร่วมกับ Consumer Software Engineering กลุ่มที่ Analog Devices เขาเข้าร่วม ADI ใน Cavite ประเทศฟิลิปปินส์ในเดือนเมษายน 2019 เขาสำเร็จการศึกษาจากมหาวิทยาลัย Adamson ในกรุงมะนิลาด้วย a ปริญญาตรีสาขาวิศวกรรมคอมพิวเตอร์ Eric เคยทำงานที่ Technology Enabler Designer ในตำแหน่งวิศวกรเฟิร์มแวร์และ เป็นวิศวกรระบบที่ Fujitsu Ten Solutions สามารถติดต่อได้ที่ eric.pena@analog.com

Mary Grace Legaspi เป็นวิศวกรเฟิร์มแวร์และเป็นส่วนหนึ่งของทีมออกแบบและเลย์เอาต์ที่ทำงานร่วมกับ Consumer Software Engineering
กลุ่มที่ Analog Devices เธอเข้าร่วม ADI ใน Cavite ประเทศฟิลิปปินส์ในเดือนกันยายน 2018 เธอสำเร็จการศึกษาจาก Tarlac State University
ด้วยวุฒิปริญญาตรีสาขาวิศวกรรมอิเล็กทรอนิกส์ กำลังศึกษาปริญญาโทสาขาการจัดการที่มหาวิทยาลัย
ของประเทศฟิลิปปินส์ เธอสามารถติดต่อได้ที่ mary.legaspi@analog.com
อ้างอิง
1.“Basics of UART Communication.” Electronics Hub, July 2017.
2.Campbell, Scott. “Basics of UART Communication.” Circuit Basics. Keim, Robert.
3.“Back to Basics: The Universal Asynchronous Receiver/ Transmitter.” All About Circuits, December 2016.
4.“What Is UART Protocol? UART Communication Explained.” Arrow.5.https://www.analog.com/media/en/analog-dialogue



ความคิดเห็น
แสดงความคิดเห็น